【FAお役立ち情報局⑪】OMRONのモバイルロボットによって
搬送工程を自動化!
2022/10/07
昨今、製造現場では人件費の増大や人手不足により省人化に注目されるお客様が増えていらっしゃいます。中でも部品供給や工程間搬送などの「搬送工程」については、生産従事者の総工数の内4~5割を占めるといった業界もあり、自動化が急務となっています。
そこで登場したのが「AMR」と呼ばれる産業用搬送ロボットです。AMRとはAutonomous Mobile Robotの略で日本語では「自立走行搬送ロボット」等と訳され、AGVに変わる次世代搬送ロボットとして注目されています。
オムロンでは、AMRを「産業用モバイルロボットLD/HDシリーズ」としてリリースしています。モバイルロボットは1997年から稼働を開始しており、今では世界中の生産現場で数千台導入されています。今回はそんなオムロンのモバイルロボットについてご紹介させて頂きます。

※モバイルロボットLDシリーズ
まずはAGVとAMR(モバイルロボット)の違いについて簡単にご説明いたします。
AGVについてはご存じの方も多いと思いますが、磁気テープ等をレールとして床に設置し、決まった経路上で搬送を行う無人搬送車のことです。それに対してモバイルロボットは、事前に搬送現場のマッピングを行うことで、磁気テープ等のレール不要で搬送作業を行うことが可能となっています。そのため、現場のレイアウト変更や設備追加にも柔軟に対応することができます。また、従来のAGVでは必要な劣化したテープを張りなおすメンテナンス作業がなく、障害物による停止も回避することが可能です。
ここからはもう少し詳しくモバイルロボットの機能についてご紹介いたします。
モバイルロボットには3つの特徴的な機能がございます。
その1つがナチュラルナビゲーション技術です。モバイルロボットには安全規格に準拠したセーフティレーザスキャナが搭載されており、動く人や障害物を回避しながら安全に走行することが可能です。更には、障害物があって通れないと判断した場合は、自動的に別のルートを考えて目的地に向かいます。これは決まった経路を持たないモバイルロボットならではの機能で、人が動く空間でも協働して搬送作業を行うことができます。
次にご紹介するのはイージーオペレーション技術についてです。例えばレイアウト変更などにより走行マップを書き換える必要が発生した場合、搬送経路上を専用のコントローラを使って1周させるだけで、ロボットのレーザスキャナが周囲の設置物をスキャンし、自動的にマップを生成してくれます。後は生成されたマップに対して、PC上で侵入禁止エリアや速度制限エリア等の設定を描き込み、目標地点を設定するだけでマップの変更が完了します。この機能により、最短半日程度でライン変更を行うことが可能です。
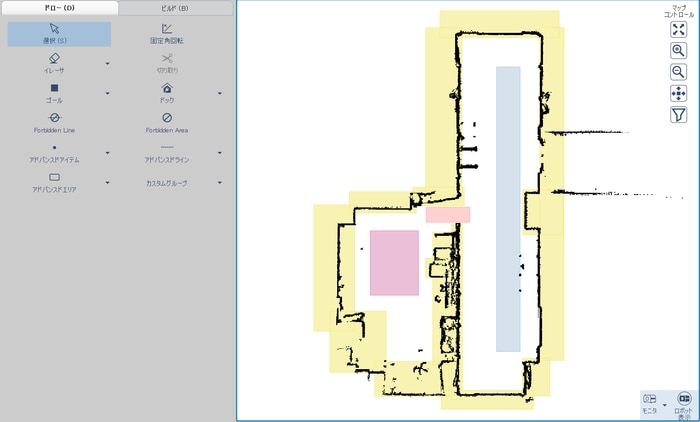
※マップ編集画面(弊社オフィスの一部)
3つ目にフリートマネジメント技術についてご紹介します。この機能は上位にFleet Managerという専用コントローラを設置することで、最大100台のモバイルロボットを同一マップで協調動作させることができます。例えば、命令するジョブに対して、その時手の空いていて目的地に近い最適なロボットを自動的に選択できます。また、狭い通路でもロボット同士が接触しないように最適なルートを指示するといった協調走行が可能となります。これにより、より効率的かつフレキシブルな搬送走行を実現できます。
最後にモバイルロボットのラインナップについてご紹介いたします。
大きく分けますと最大積載重量が60kg~250kgのLDシリーズと大型ワーク向けの最大積載重量1500kgのHDシリーズの2タイプがございます。その他、オムロンの協調ロボットTMシリーズを上部に搭載することで、移動してピック&プレース作業等が可能なモデルなどもご用意がございますのでお客様の搬送ワークや作業に応じたモデル選択が可能となっております。

※各種ラインナップ+お客様によるカスタム例
今回ご紹介したOMRONモバイルロボットはいかがでしたでしょうか?
もしご興味がございましたら、実機を用いた体験会等を企画することも可能ですので、
是非ともエフ・エー・アネックスまでお問い合わせくださいませ。
関連記事
